2024年6月CiteScore 2023数据公布,Drones 期刊保持在航空航天工程领域(Aerospace Engineering)Q1,排名30/153,在Control and Systems Engineering,Information Systems;Computer Science Applications和Artificial Intelligence领域位列Q2。同月科睿唯安发布了2023年期刊引证报告(Journal Citation Reports™),Drones 期刊进入“遥感科学”(Remote Sensing)学科类别Q1行列。这一成就不仅是对Drones 期刊学术质量的肯定,更是对所有编委、编辑同事以及广大作者和审稿人辛勤工作的认可。在此,Drones 期刊编辑部向各位编委、客座编辑、审稿专家、作者们对期刊一直以来的支持表示衷心的感谢。
期刊简介
Drones (ISSN: 2504-446X,https://www.mdpi.com/journal/drones) 期刊由MDPI每月在线发布。该期刊主要关注无人机的设计和应用,包括无人驾驶飞行器 (UAV)、无人驾驶飞机系统 (UAS) 和遥控飞机系统 (RPAS) 等。同样,也欢迎基于无人海洋/水上/水下无人机、无人地面车辆、全自动驾驶和太空无人机等方向的投稿。目前期刊已被 SCIE、Scopus,CNKI,Inspec 等数据库收录。期刊下设5个专栏,各专栏由相应领域科学家担任执行主编,并有来自领域内的资深学者担任编委,负责把控所发表文章的质量以及专栏的整体发展方向。
主编介绍

Prof. Dr. Diego González-Aguilera
萨拉曼卡大学,西班牙
研究领域:摄影测量;激光扫描;三维建模;地形学;制图学。

Prof. Dr. Pablo Rodríguez-Gonzálvez
莱昂大学,西班牙
研究领域:摄影测量;无人机;激光扫描;辐射校准;遥感;RGB-D 传感器;3D 建模;移动测绘;计量。
新晋副主编介绍

董希旺教授
北京航空航天大学
研究领域:集群智能;协同控制;协同制导;协同决策规划;飞行器集群。

Prof. Dr. Petros S. Bithas
希腊-雅典国立卡波季斯特里安大学 (NKUA)
研究领域:无线通信信道的随机建模;V2X 通信系统的设计和性能分析。

Prof. Dr. Andrey V. Savkin
澳大利亚新南威尔士大学
研究领域:机器人导航;无人机部署;无人驾驶飞行器;无线通信网络控制;电力系统控制;鲁棒控制和滤波;混合动力系统;控制工程;生物医学工程。

Prof. Dr. Oleg Yakimenko
美国海军研究生学校
研究领域:航空航天系统;制导;导航与控制;图像处理;人工智能;蜂群。
期刊学术活动
线下活动

2023 年国际无人机系统会议设展(举办地点:波兰)

2023第七届全国集群智能与协同控制大会设展 (举办地点:南京)

2024年国际无人机系统会议设展(举办地点:希腊)
线上活动
EO&GEO Series 系列线上研讨会
https://sciforum.net/event/topics-7
https://sciforum.net/event/topics-8
https://sciforum.net/event/topics-17
好文推荐
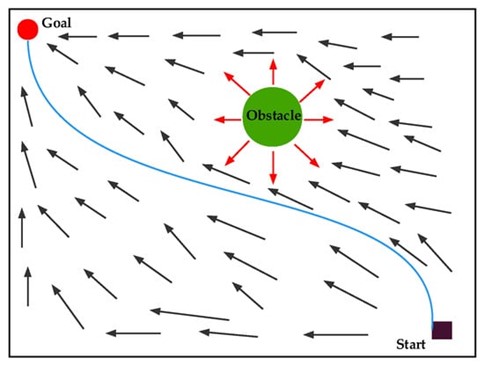
1.Review of Autonomous Path Planning Algorithms for Mobile Robots
自主移动机器人路径规划算法综述
邵士亮等
https://www.mdpi.com/2504-446X/7/3/211
文章亮点:
1. 全面性:本文全面介绍了移动机器人的路径规划和避障方法,为该领域的研究人员提供了参考。它不仅总结了最新的进展和突破,还讨论了未来值得研究的方向。
2. 分类详尽:文章将移动机器人的路径规划方法分为基于图搜索、启发式智能、局部障碍物避让、人工智能、基于采样、基于规划器、基于约束满足问题等类别,并对每种方法的基本原理和相关研究进行了深入讨论和比较。
3. 未来研究方向:文章不仅回顾了现有的研究成果,还提出了未来研究的潜在方向,如多机器人系统的路径规划算法、不同机器人之间的协作路径规划,以及如何结合机器学习和其他技术提高算法的适应性和智能化水平。
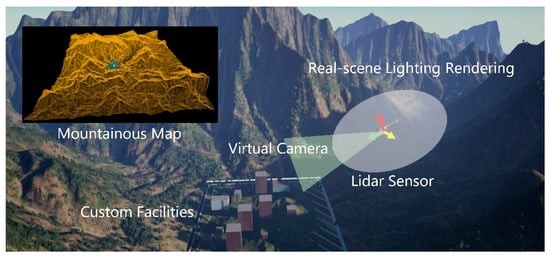
2.An Autonomous Control Framework of Unmanned Helicopter Operations for Low-Altitude Flight in Mountainous Terrains
基于无人机着舰过程中的阻拦钩与阻拦索相互作用的动态分析与数值仿真
向锦武院士等
https://www.mdpi.com/2504-446X/6/6/150
文章亮点:
1. 创新的耦合模型:文章建立了一种新型的刚柔耦合模型,使用有限元-多体动力学(FEM-MBD)方法来模拟无人机(UAV)在航空母舰上的阻拦钩与阻拦索的交联过程,这为理解复杂的动态交互提供了新的视角。
2. 全面的动态分析:研究不仅考虑了阻拦钩与阻拦索的相互作用,还包括了对起落架冲击吸收器模型、柔性轮胎以及阻拦索和钩的材料属性和机械特性的细致分析,提供了对交联过程性能的深入理解。
3. 模拟与实验数据对比验证:通过与实验数据的比较,验证了所提出模拟方法的准确性,确保了模型的可靠性。此外,模拟方法能够捕捉到钩的反弹运动、索在交联过程中的弯曲以及钩上的应力分布,为无人机着舰设计提供了有价值的见解。
3.Autonomous Unmanned Aerial Vehicles in Bushfire Management: Challenges and Opportunities
在灌木丛火灾管理中的自主无人机:挑战与机遇
Shouthiri Partheepan 等
https://www.mdpi.com/2504-446X/7/1/47

文章亮点:
1. 技术集成: 文章强调了无人机(UAV)技术与人工智能、机器学习以及深度学习算法的集成,这些技术的结合可以提高在复杂环境中监测和预测灌木丛火情的能力。
2. 多传感器使用: 讨论了无人机搭载的多种先进传感器,如激光雷达(LIDAR)、可见光、红外(IR)和单目相机,这些传感器的应用为火情监测提供了新的研究途径和机会。
3. 实际应用与挑战: 论文不仅审视了无人机在灌木丛火灾管理中的应用,如火情检测、预测、自动导航、障碍物避让和搜救,还提出了实施中可能遇到的技术挑战和环境难题,如电池能量限制、相机性能局限、GPS信号的缺失或不准确等。
特刊推荐
1.UAS in Smart Agriculture: 2nd Edition
Submission deadline 15 Sep 2024
Edited by Fei Liu and Yangquan Chen
https://www.mdpi.com/journal/drones/special_issues/R0166M7AK5
2.Detection, Identification and Tracking of UAVs and Drones
Submission deadline 25 Oct 2024
Edited by Richard Han,V.P Nguyen, Karthik Dantu and Endrowednes Kuantama
https://www.mdpi.com/journal/drones/special_issues/I5U80041H8
3.UAV-Assisted Mobile Wireless Networks and Applications
Submission deadline 29 Nov 2024
Edited by Tomotaka Kimura and Chinthaka Premachandra
https://www.mdpi.com/journal/drones/special_issues/17KPBNWWJI
特刊书推荐
1.Multi-UAV Networks
Edited by Zhihong Liu, Shihao Yan, Yirui Cong and Kehao Wang
https://www.mdpi.com/books/reprint/8621-multi-uav-networks
2.Intelligent Image Processing and Sensing for Drones
Edited by Seokwon Yeom
https://www.mdpi.com/books/reprint/9130-intelligent-image-processing-and-sensing-for-drones
3.Urban Air Mobility (UAM)
Edited by Ivana Semanjski, Antonio Pratelli, Massimiliano Pieraccini, Silvio Semanjski, Massimiliano Petri and Sidharta Gautama
https://www.mdpi.com/books/reprint/8176-urban-air-mobility-uam
4.Intelligent Coordination of UAV Swarm Systems
Edited by Xiwang Dond, Mou Chen, Xiangke Wang and Fei Gao
https://www.mdpi.com/books/reprint/7951-intelligent-coordination-of-uav-swarm-systems


